 |
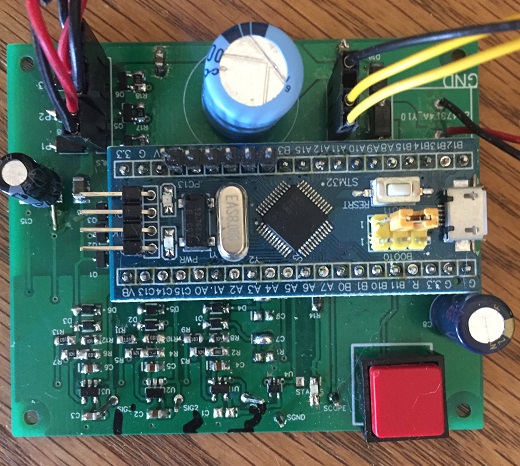
Barb bought the garden art but it loooked so uninspiring just sitting there. I added an arduino, some magnets and Bob's your uncle! Latest update: re-engineered to run on 32 bit "Blue Pill on a custom PCB"
 |
 |
 |
|
 |
 |
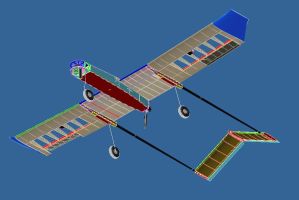
I developed, manufactured and marketed the first low cost autopilot for UAVs in the late 1990s. The project was very successful and was one of the key reasons that I was able to retire at an early age. I have continued my interest in drones since then and have started using the open source Pixhawk autopilot. It is interesting to note that the Pixhawk is smaller, faster, has much better sensors and is available for one tenth the cost of my original design. The Zagi is one of the many UAVs (drones) using Pixhawk autopilot. This one is based on a Zagi 60. The Zagi was a frustrating airframe to work with because tip stalls were a constant threat. More recently I have acquired a laser cutter from China and am getting a lot of pleasure designing and flying my own airframe designs using Autodesk Inventor.
 |
 |
I hated putting up the fence - the pronghorns ("antelope") will not jump a fence but I had to do something to keep the cows out. The need for an electric remote gate opener presented an opportunity for another project. Latest revision uses an ATtiny841.
 |
 |
 |
 |
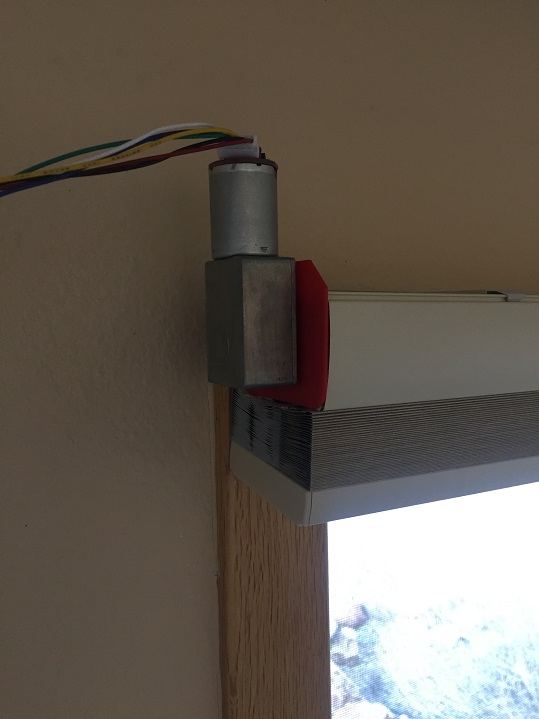
The view out our bedroom window is spectacular. But getting up to close the window blinds is not. A remote IR sensor makes it easy.
 |
 |
 |
 |
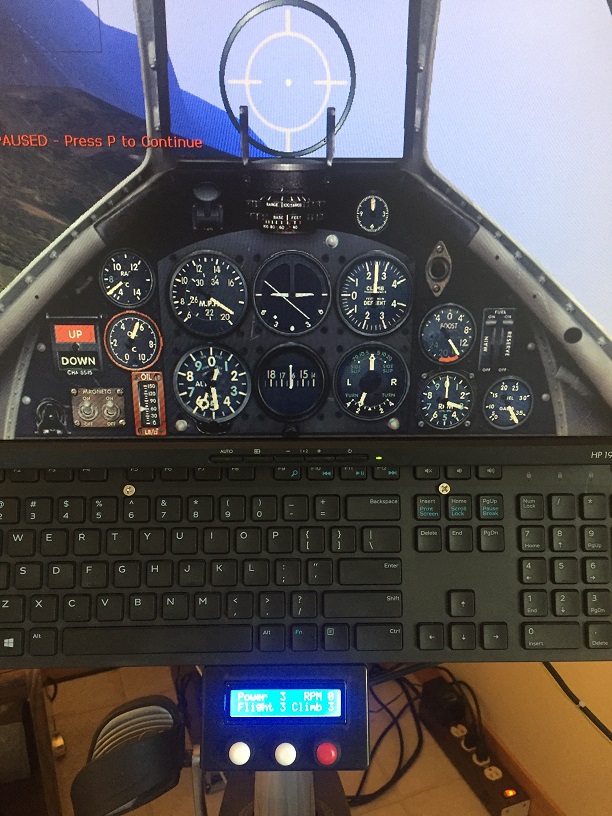
After getting a new bionic knee, the physical therapist recommended a stationary bike, but I could not stand the boring routine of an ordinary exercise bike. I modified a recumbent exercise machine to interface to an old PC. The PC is running a combat flight simulator "IL-2 Strumovik". An Arduino Pro Micro interfaces the exercise machine's pedal rate and joystick setting to the PC running the game by emulating keyboard actions. The pedal rate of the exercise machine determines the throttle setting of the airplane's engine and the joystick position determines the change in effort on the pedals - pedaling faster increases the engine RPM and pulling back on the stick to climb increases the pedal load. Buttons allow setting the baseline resistance and adjusting the change in resistance according to joystick position. Fun!
 |
|
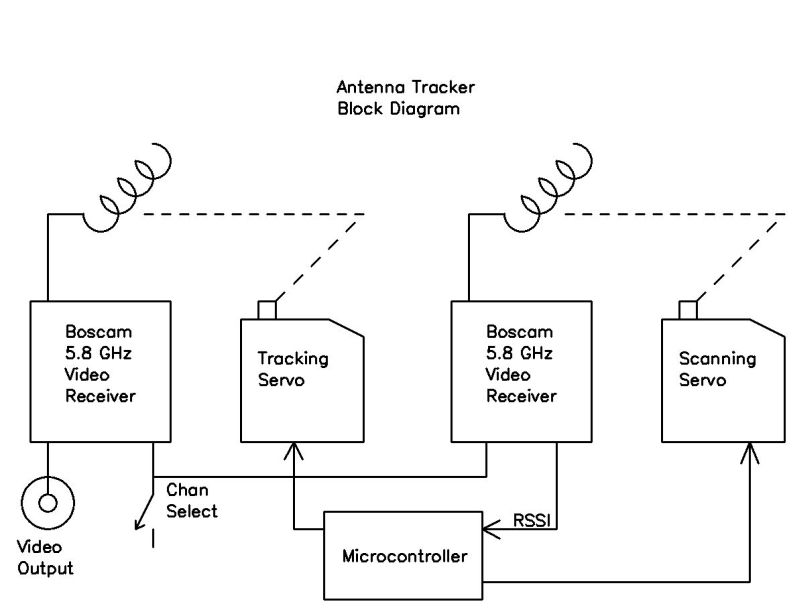
This antenna pointing control system uses two 5.4 GHz receivers. One reciever is connected to a scanning antenna that locates the direction of the strongest signal in the sky. The other receiver's antenna then servos to the direction of the strongest signal. The project uses a small MicroChip Technology PIC microcontroller.
 |
 |
Barb's allergies were acting up, so I made a particle counter to keep track of the outdoor air quality.
 |
Grandson and I spent some time in our "Rocket Lab" building potassium nitrate and sugar rockets.
 |
 |
I put together an eBike but the first time I tried it out, the battery ran low so I created this eBike power meter. The meter shows the range remaining at your current (instantaneous) rate of pedal energy input and gear selection, also the trip average kilometers remaining. Second line shows battery Voltage, current power drain and battery percentage remaining. The effect of pedaling harder of shifting gears can be immediately seen as it affects the range remaining. (Note the difference between the commercial bike computer showing 100% battery and mine showing 68%)
 |
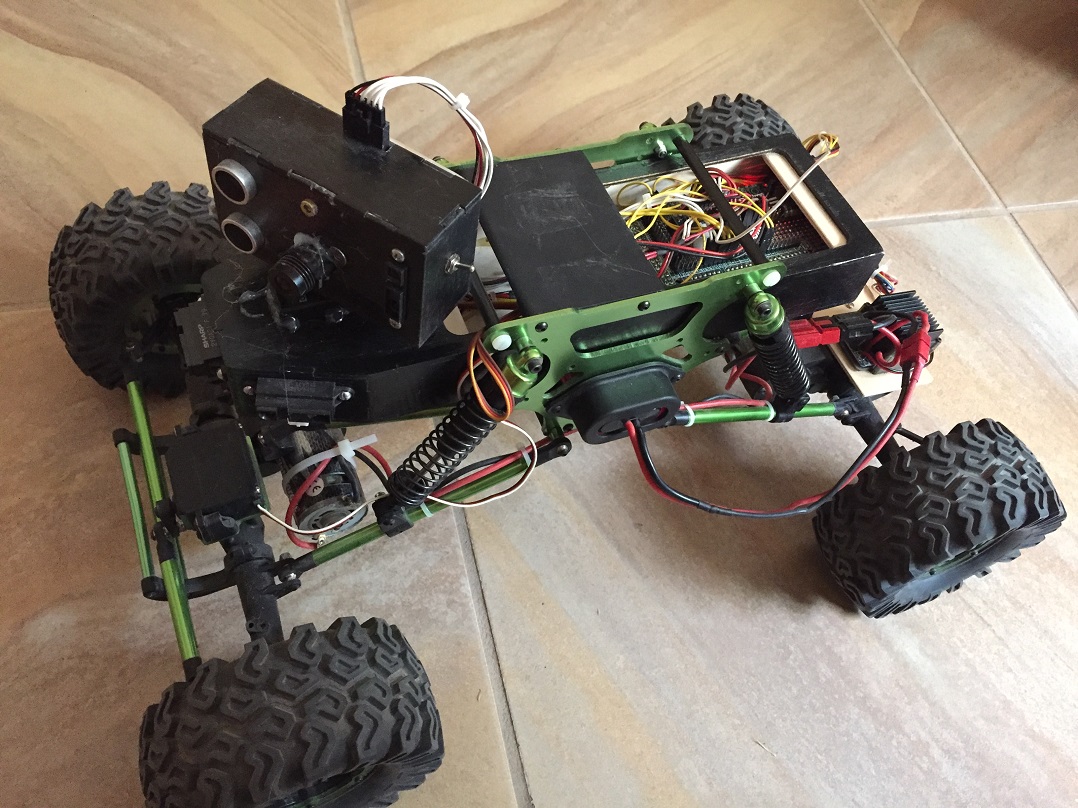 |
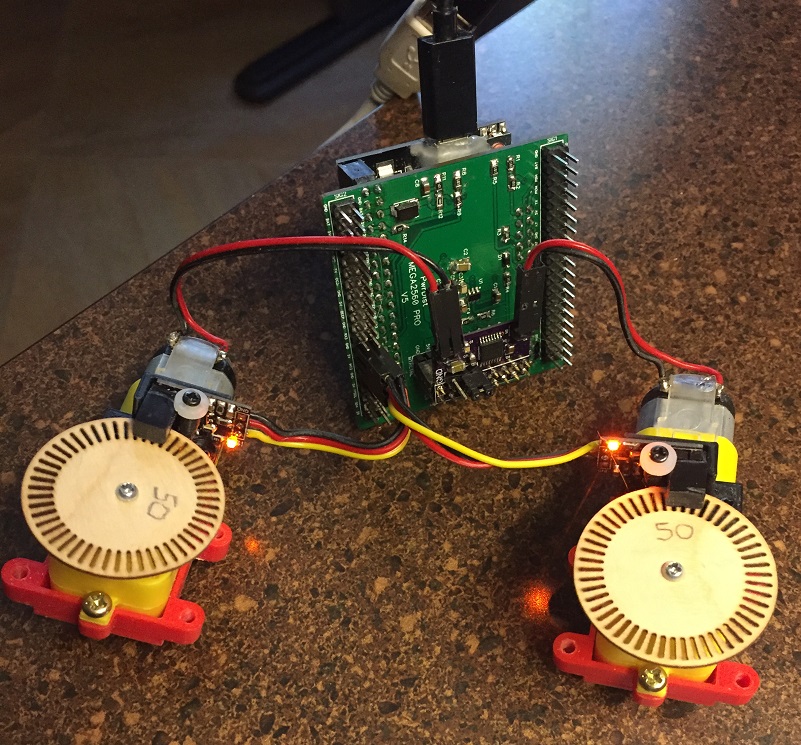
This basic robot has grown. Originally started as a project to interest youngsters, it turned out to be an engaging project for me. I started with an Arduino UNO, then a 32U4 (which works quite well), then a STM32 BluePill, then a Mega2560 and finally settled on an Arduino Mega2560 Pro with custom interface board. Another version of the project uses an off-the-shelf RC rock crawler with front wheel steering instead of differential motors.
Features:
2 bumper switches
Ultrasonic obstacle sensor
LIDAR obstacle sensor
Compass
Bluetooth or RF MODEM
Shaft encoders on motors
PID motor speed control
Sound generation
 |
 |
 |
 |
Latest version of project has added several updates. I call her YAAR - Yet Another Ardunio Robot (ar ar - Lt. Yar, Star Trek). The project is broken into 2 major parts; the bottom "drive" unit and the upper "brains" unit.
Raspberry Pi with camera
Communication to Pi via SSH and UV4L (video)
Mega2560 Pro with custom control board
Pi <-->Arduino via serial
Pushbutton ON/OFF switch
2s to 4s LiPo custom power supply
Custom motor controller up to 1 kW
Steerable third wheel
Currently, I act as "god" by sending commands from my PC to the "brain" via SSH while monitoring YAAR's progress via video link on my PC, The Pi echos these commands to the "drive" unit. My plan is to relinquish my status to the Pi, which can create the needed commands to achieve some goal e.g. follow line, follow color blob, navigate, ???
 |
Had fun working with Barb's grandson Alex on a weather station
 |
 |
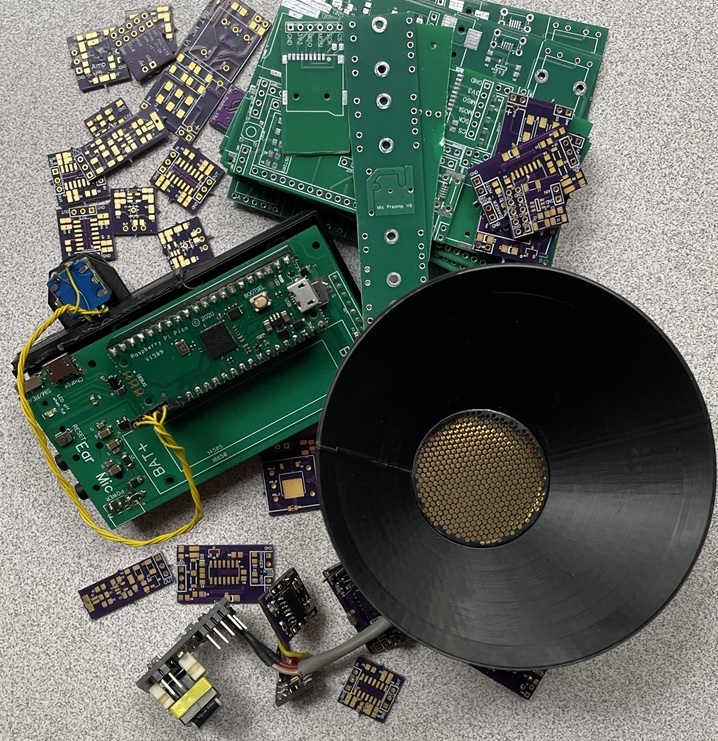 |
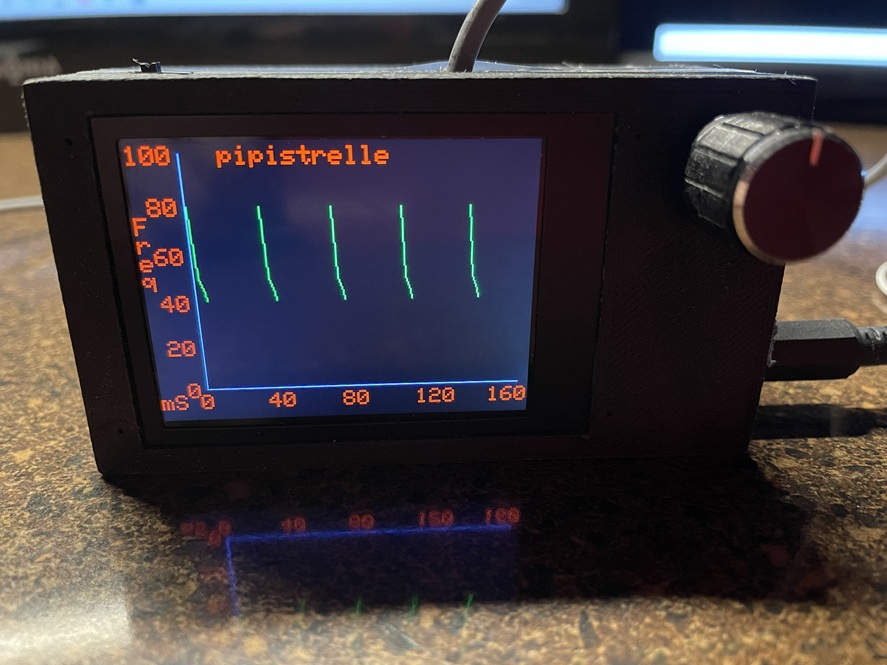
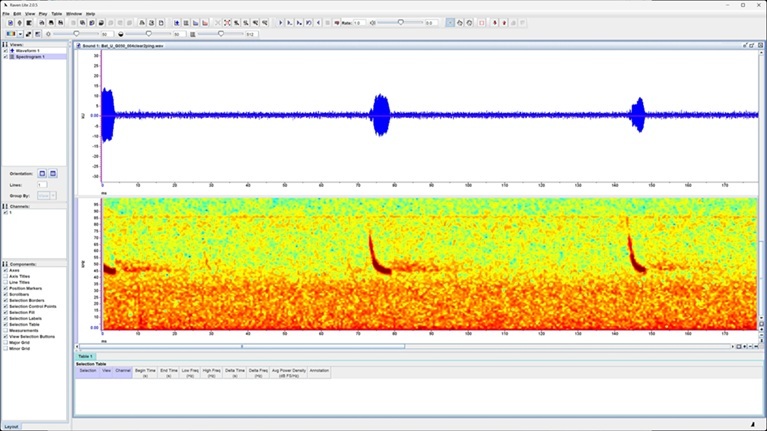
My Bat Phone - so I could listen to the bats. Larger than usual pile of useless parts on the way to completion.
 |
 |
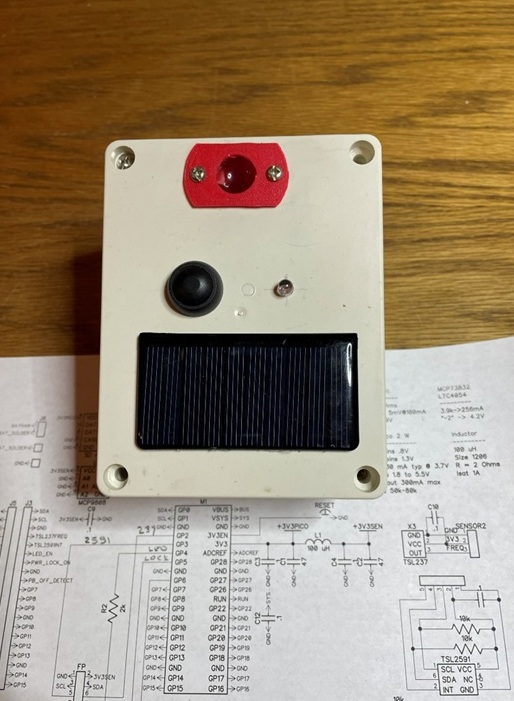 |
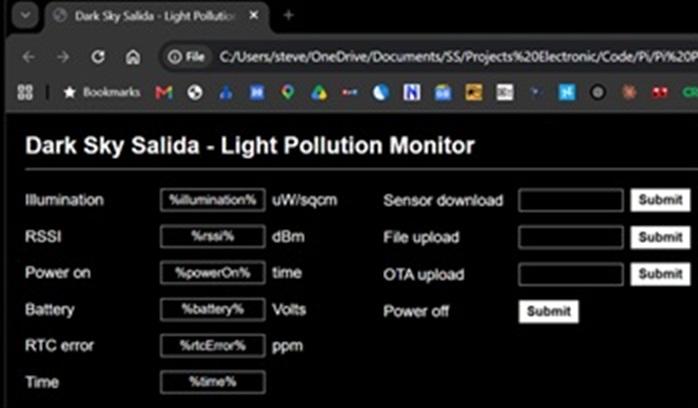
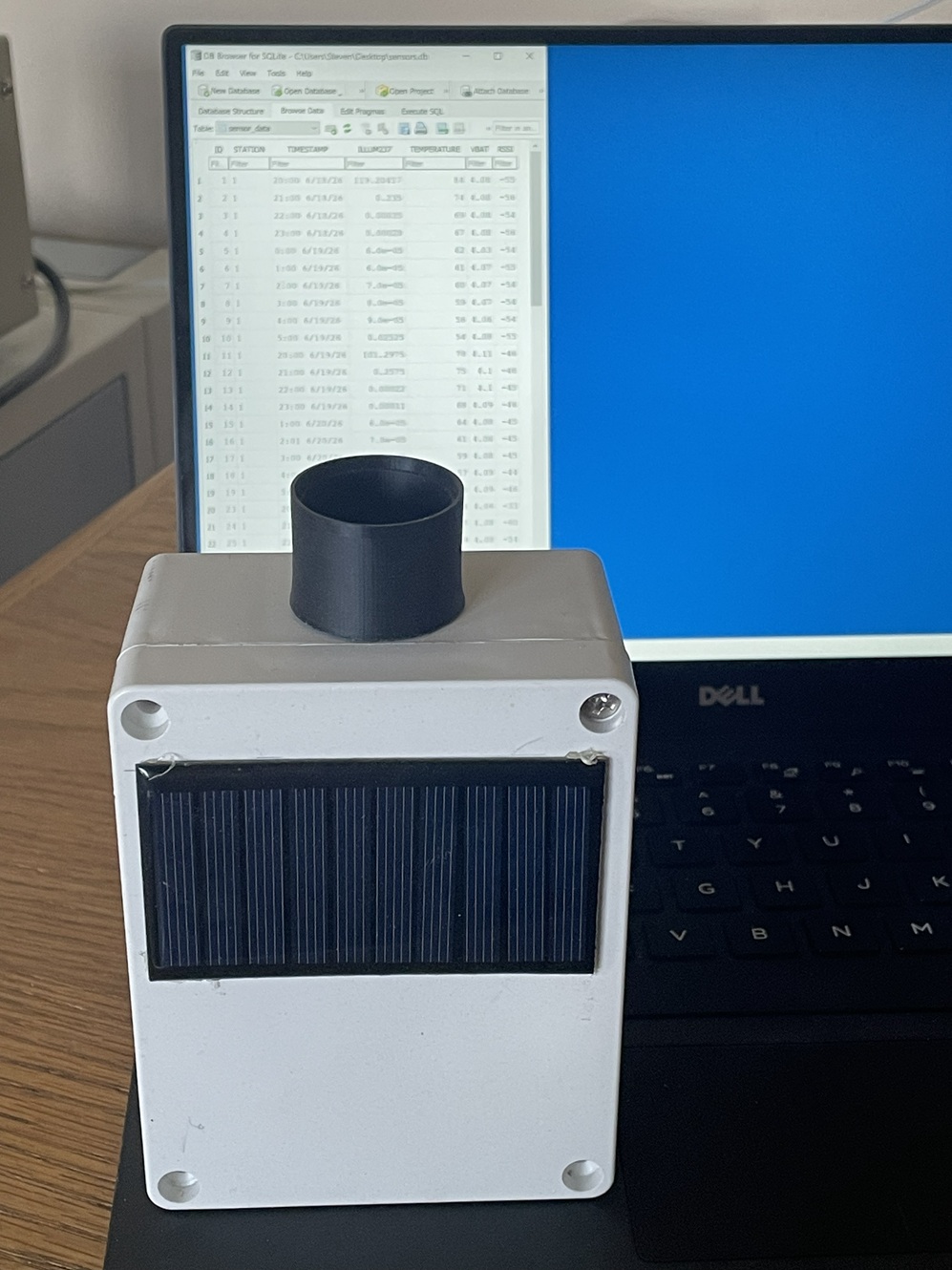
Now working on low level light meter for Dark Sky movement. Unit will operate autonomously to record night time light levels. Data is sent to online database. Goal is to reduce artificial light at night.